spring boot
爱心捐赠
慈善捐赠管理
线性空间
部署
web
node.js
集合
少儿编程
课程设计
.md预览
知识蒸馏
框架
ras
端口号
iVX
Impala
hevc
计算机毕业设计
系统架构
FANUC机器人
2024/4/11 16:04:58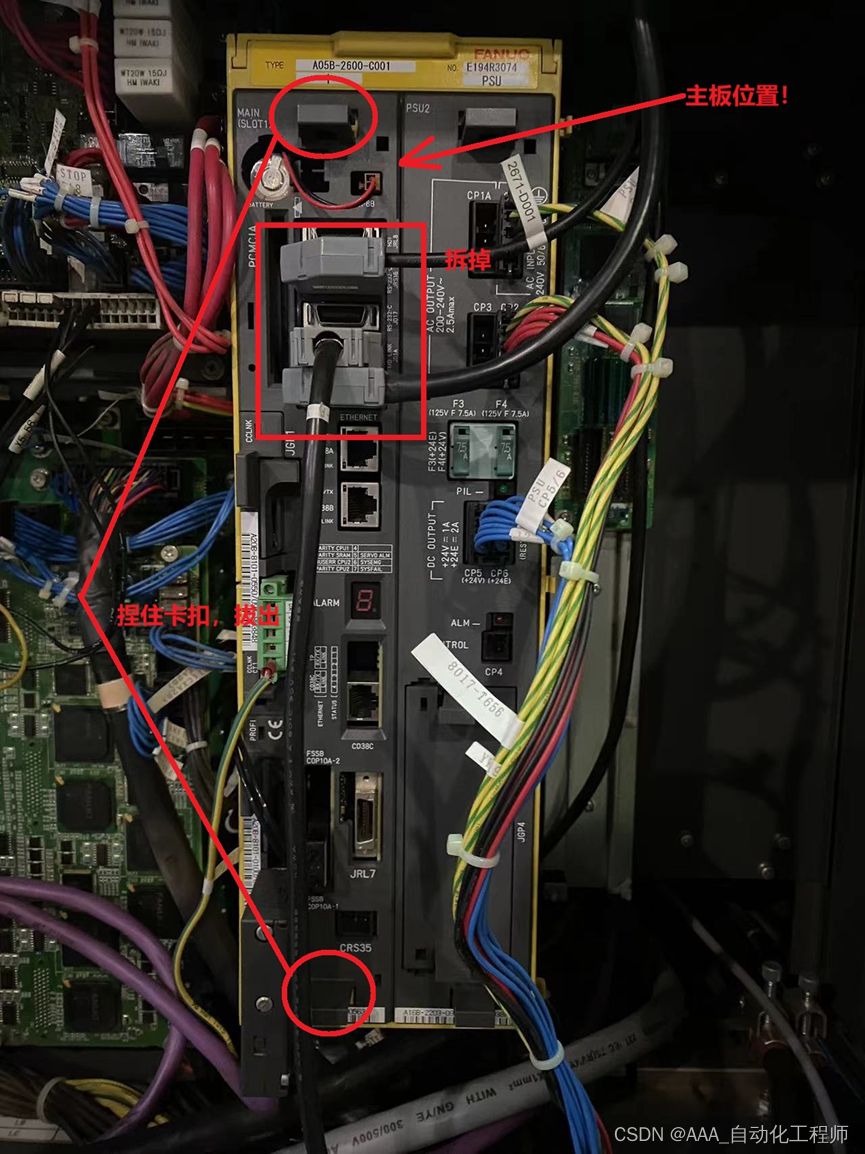
FANUC机器人开机时无法进入系统,示教器黑屏故障处理总结
FANUC机器人开机时无法进入系统,示教器黑屏故障处理总结 故障描述: FANUC机器人开机时,示教器在初始化时显示:EMAC initial call failed(示教器上电时会进入boot画面,左上角会出现一些白色的英文提示&#…

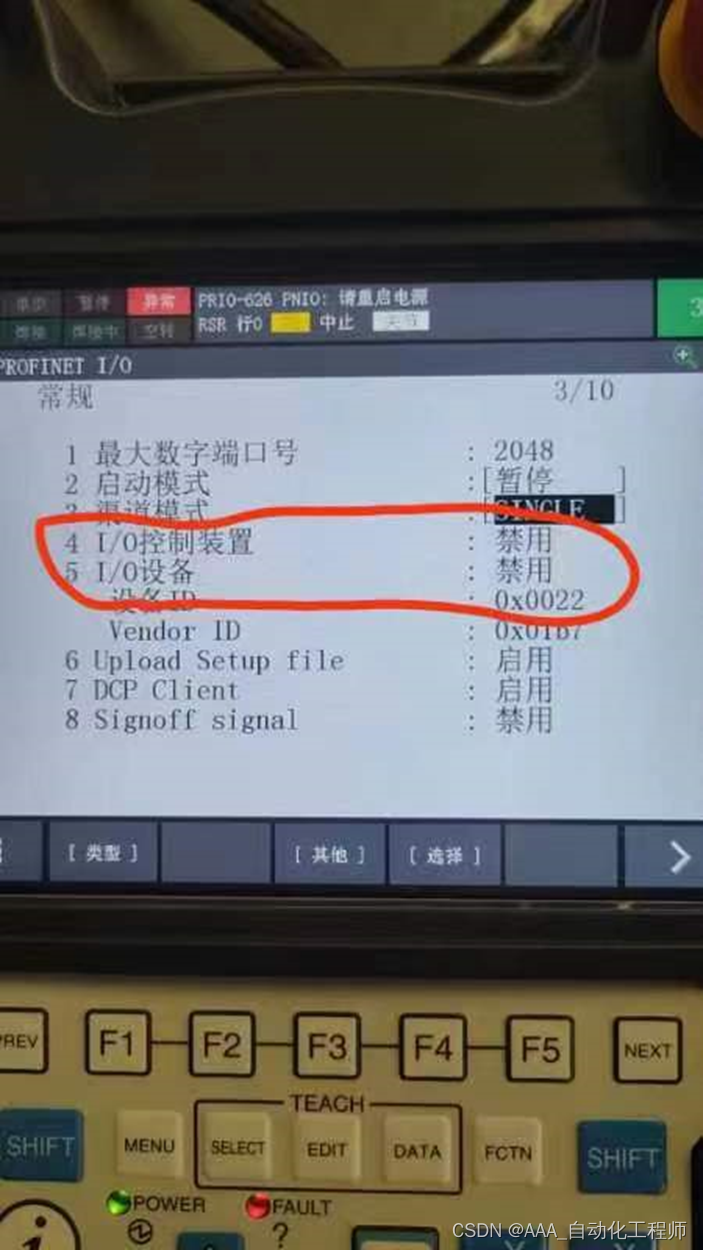
FANUC机器人PROF-017从机断开故障报警处理方法总结
FANUC机器人PROF-017从机断开故障报警处理方法总结 情况说明: 机器人安装的是PROFINET板卡,按照手册进行PROFINET配置之后,重启控制柜,此时系统提示:PROF-017 从机断开,
如下图所示, 打电话咨…
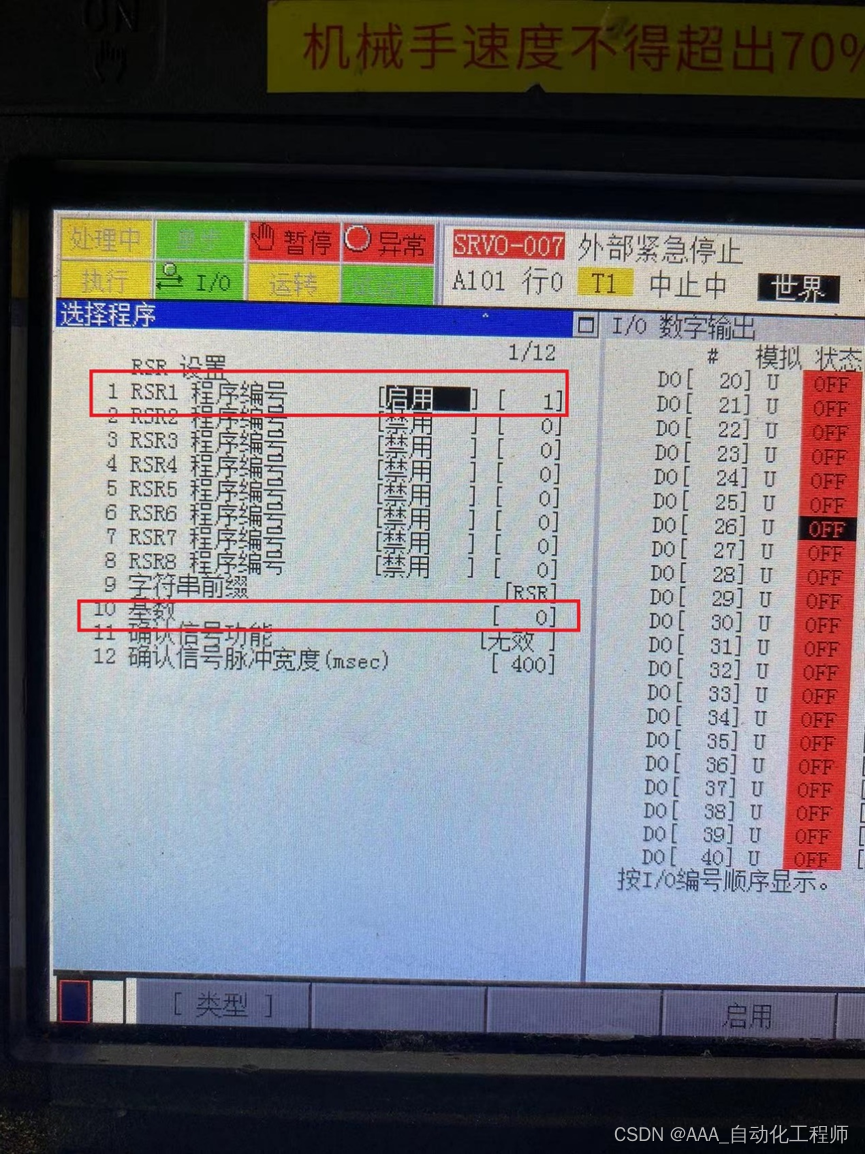
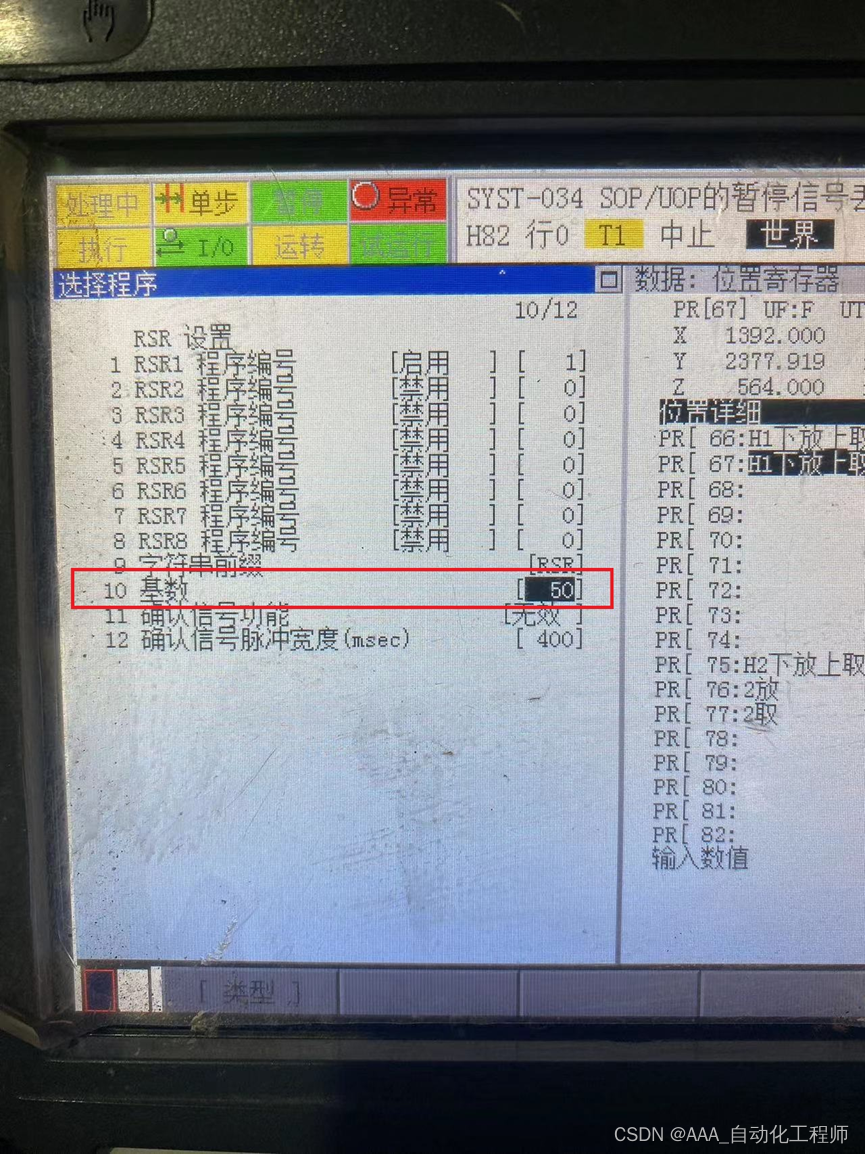
FANUC机器人外部远程启动的相关参数设置示例
FANUC机器人外部远程启动的相关参数设置示例 如下图所示,在MENU---设置---选择程序中,设置程序选择模式:RSR(这个根据自己实际使用的自动启动方式来决定,你用RSR选RSR,用PNS就选PNS), 自动运行开始方法:选择UOP,即RSR1-RSR8的启动信号分别对应UI9-UI16,
最后,点击…

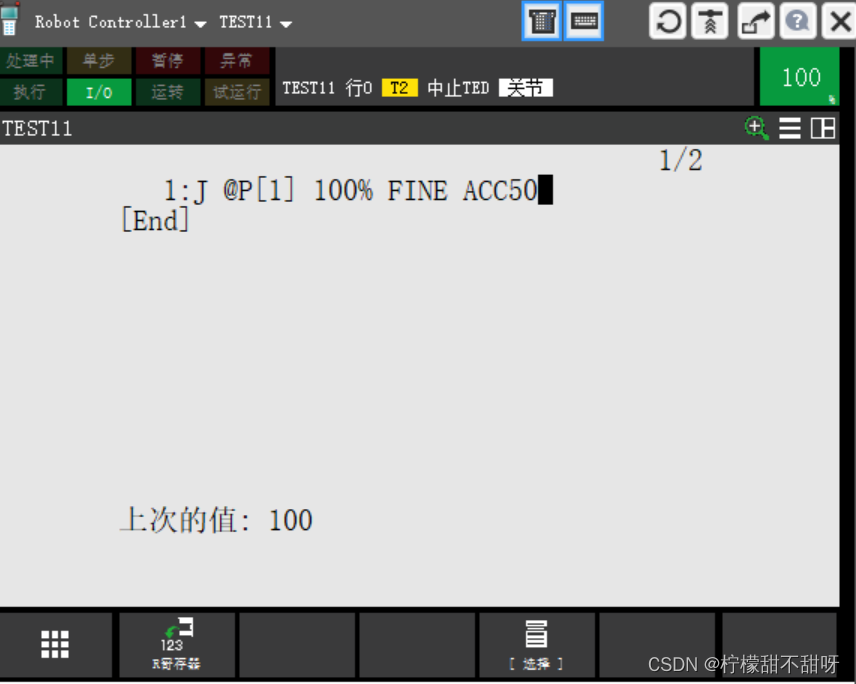
FANUC机器人加减速倍率指令ACC的使用方法说明
FANUC机器人加减速倍率指令ACC的使用方法说明 单位有一台FANUC机器人(型号:M-900iB 360kg),偶尔会在启动的瞬间会报SRVO-050碰撞检测报警,而事实上机器人并没有开始移动或和其他工件产生碰撞,一直查了很长时间,也没有查到具体的原因,也尝试过重新进行负载推算,但是偶尔…

FANUC机器人信号提前触发指令说明
创建一个测试指令用的TP程序。 创建一个基础的运动指令,将光标移动至指令最后的空格栏,点击下方的选择按钮。 添加一个之前时间的动作,TB代表是J1动作之前几秒触发 下述这行语句代表的是在完成J1动作的前3S触发一个DO20为真的一个信号。 同理…

ROBOGUIDE教程:FANUC机器人X型焊枪气动点焊焊接
目录
概述
机器人系统创建
X型点焊焊枪安装与配置
机器人组输出(GO)信号配置
气动点焊初始设置
点焊设备设置
点焊设备I/O信号设置
焊接控制器I/O信号设置
X型点焊焊枪运动控制配置
气动焊枪手动运行操作
气动点焊焊接指令介绍
机器人点焊焊接程序编写
机器人仿…
FANUC机器人PRIO-621和PRIO-622设备和控制器没有运行故障处理
FANUC机器人PRIO-621和PRIO-622设备和控制器没有运行故障处理 如下图所示,新的机器人开机后提示报警:
PRIO-621 设备没有运行 PRIO-622 控制器没有运行 我们首先查看下手册上的报警代码说明,如下图所示, 如下图所示,…
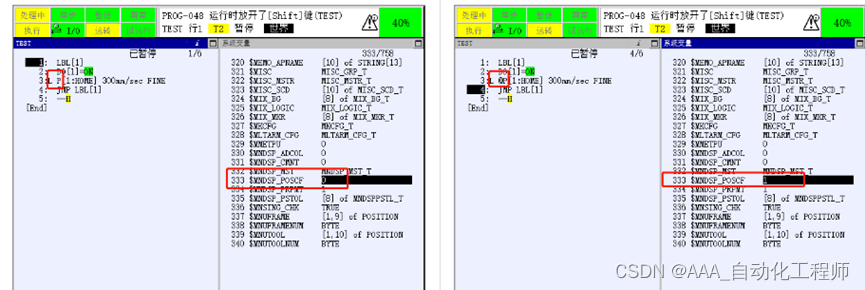
FANUC机器人到达某个点位时,为什么不显示@符号?
FANUC机器人到达某个点位时,为什么不显示@符号? 该功能由变量$MNDSP_POSCF = 0(不显示)/1(显示)/2(光标移动该行显示) 控制,该变量设置为不同的值,则启用对应的功能。
如下图所示,为该变量设置不同的值时的对比, 其他常用的系统变量可参考以下内容: 在R寄存器指定速度…
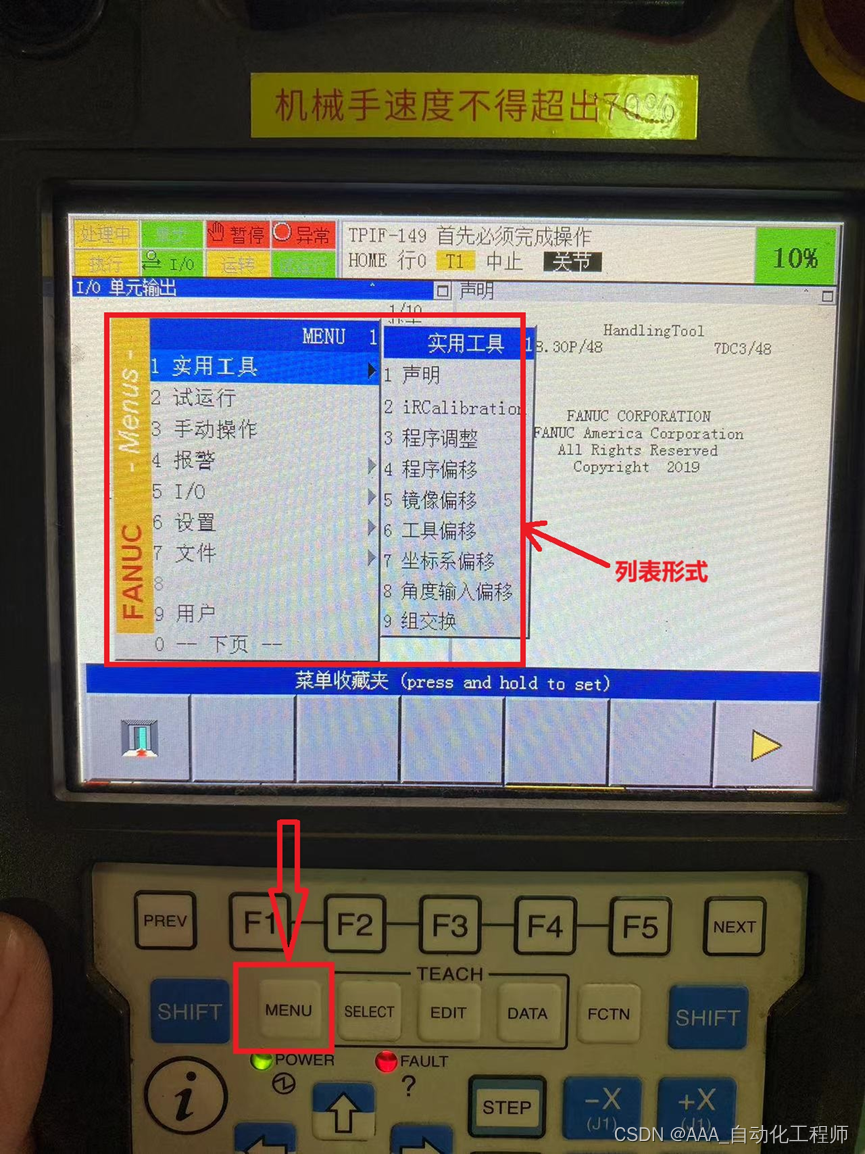
FANUC机器人示教器的菜单变成了图标,如何改成列表的形式?
FANUC机器人示教器的菜单变成了图标,如何改成列表的形式? 如下图所示,开机后按下MENU菜单键时,发现原来的列表形式变成了菜单图标的形式,同时在按F1-F5键时,提示:HMI模式-键不可用, …

FANUC机器人如何清除示教器右上角的白色感叹号?
FANUC机器人如何清除示教器右上角的白色感叹号? 如下图所示,示教器上显示白色的感叹号,如何清除呢?
具体可参考以下步骤:
按下示教器上白色的“i”键,如下图所示, 如下图所示,按…
ABB、FANUC机器人点位加速度用法
机器人在点位与点位之间的运动,会存在速度上的变化,加速度指令的添加可以减小机器人在运动中,由高速到低速间惯性的带来的影响,修正机器人的路径误差,让机器人的运动更加顺滑。
一、ABB机器人指令添加
ABB机器人加速…

FANUC机器人_通过ROBOGUIDE从零开始做一个离线仿真项目(4)
FANUC机器人_通过ROBOGUIDE从零开始做一个离线仿真项目(4) 上次和大家分享了如何添加一个用于放置物料的托盘,以及如何在手腕末端添加吸盘工具用于抓取工件,具体内容可参考以下链接: FANUC机器人_通过ROBOGUIDE从零开始做一个离线仿真项目(3)
本次继续和大家分享如何示…

FANUC机器人系统配置相关--系统变量介绍
FANUC机器人系统配置相关–系统变量介绍 系统配置页相关变量 1- 停电处理$SEMIPOWERFL = TRUE(有效)/FALSE(无效)
2- 停电处理中的I/O $PWF_IO = 1(不恢复)/2(仿真恢复)/3(解除仿真)/4(恢复所有)
3- 停电处理无效时自动执行的程序 $PWR_NORMAL = ‘’
4- 停电处理有效时自动…

FANUC机器人KAREL语言程序结构(入门)
一、karel语言程序结构
FANUC机器人keral语言编程结构如下图所示: Keral指令对应的基础用法如下所示: 二、创建一个简单的写屏程序
依照对应的karel语法写写入下列程序 运行对应的程序进行测试:
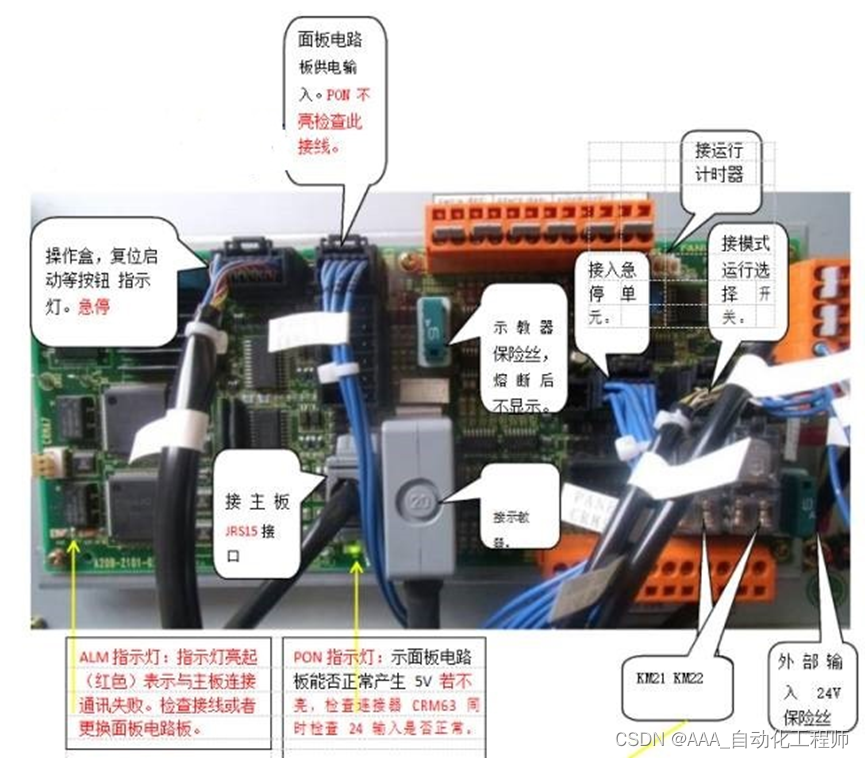
FANUC机器人电气控制柜内部硬件电路和模块详细介绍
FANUC机器人电气控制柜内部硬件电路和模块详细介绍 PSU电源单元 通过背板传输了如下电源 +5 +2.0V +3.3 +24v +24E +15V -15V 主板--接口描述: 主板内部结构: 面板电路板: 引申一下 KM21 与 KM22 的作用它们分别接至操作面板上上的急停按
![FANUC机器人UI[4]_CSTOPI循环停止信号使用时的注意事项](https://img-blog.csdnimg.cn/b7e576dbeb0047f89b873c2762aa4954.jpeg#pic_center)
FANUC机器人UI[4]_CSTOPI循环停止信号使用时的注意事项
FANUC机器人UI[4]_CSTOPI循环停止信号使用时的注意事项 前面已经和大家介绍了关于FANUC机器人的UOP信号的具体功能,具体可参考以下链接中的内容: FANUC机器人UOP信号(UI+UO)功能详细介绍
本次关于FANUC机器人的UI[4] CSTOPI循环停止信号使用时的注意事项进行一个补充说明。…
ROBOGUIDE教程:FANUC机器人固定点焊焊接虚拟仿真
目录
概述
机器人系统创建
焊接工件模型创建
机器人抓手工具添加与工件安装
工作台添加与工件安装
固定点焊焊枪支架模型创建与组装
固定点焊焊枪添加与配置
机器人远程TCP标定(核心内容)
远程TCP手动测试
远程TCP指令介绍
机器人仿真程序编写
机器人示教编程
机…

FANUC机器人某个轴编码器损坏时进行单轴零点标定的具体方法
FANUC机器人某个轴编码器损坏时进行单轴零点标定的具体方法 前提: FANUC机器人编码器或其线路有损坏,一般先将机器人移动至零点位置,编码器相关部件更换完毕后,直接进行零点标定即可。但是对于突发的状况,这种方法显然是不行的,比如在生产过程中突然发生碰撞导致编码器相…

FANUC机器人零点标定的基本步骤(出厂数据)
FANUC机器人零点标定的基本步骤(出厂数据) FANUC 零点数据存在问题的机器人通常会出现以下几种报警:
(1)SRVO-062报警 - 脉冲编码器数据丢失,机器人完全不能动,具体消除方法可参考以下链接中的内容:
FANUC机器人SRVO-062报警原因分析及处理对策
(2)SRVO-075报警 -…
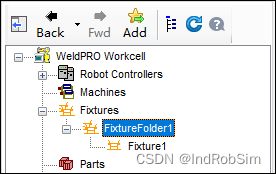
ROBOGUIDE教程:三维模型创建功能介绍与操作方法
目录
概述
模型创建方法
模型属性设置
其他类型模型创建
资源文件夹创建
安全围栏模型创建 概述
ROBOGUIDE软件除了可以从外部导入模型外,软件自身也可以创建一些简易的三维模型,在对FANUC机器人虚拟仿真或离线编程时,可以利用这个功能…
FANUC机器人选择主程序的具体方法和注意事项
FANUC机器人选择主程序的具体方法和注意事项 如下图所示,举例,某产品的取放料方式为:成型机顶模取料+热压机下模放湿胚,此时应该选择的主程序为RSR0081, 如下图所示,进入MENU—设置—选择程序, 如下图所示,按F3按键进入详细画面, 如下图所示,当选择主程序为RSR0081时…